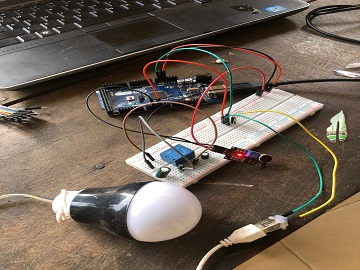
Control Your Bulb Using Android Devices This project is about how one can connect an electric bulb (or any device) with an Arduino Uno using a Relay Module. It also covers connecting Arduino with Android devices and then remotely switching Read More …
376235 total views